

以为 H7 的 libopencm3 开发也和 F1、F4 用起来一样简单,结果发现还是有些不一样的,自己先小折腾了半天,差点刚开坑就结束了。
在上一篇文章中我们使用 HAL 库实现了 STM32H7 的 GPIO 控制功能,本文我们使用 libopencm3 库来实现同样的功能,有关于 libopencm3 的介绍可以参考我前面写的libopencm3 开发STM32体验笔记。
强烈推荐大家看一下这篇文章,才好理解 libopencm3 的使用方式,否则可能很难快速上手。
本文代码仓库:stm32h7-libopencm3,不想看我啰嗦的,可以直接拉代码,目录结构清晰,还写了详细注释。
本文对应于仓库中的 1gpio 文件夹
开发环境简单说明
- 系统:Ubuntu 24.04 LTS(没啥特别的,装好 git、make 等基础工具即可)。
- 开发工具链:arm-none-eabi-gcc
- apt 里有老版本。
- ARM 官网可下最新版:ARM GNU Toolchain。
- 我用的是 14.3 版本。装完记得把路径加到环境变量。
- 构建工具:xmake
- 上手比 cmake 直观,能生成 makefile、ninja 等多种配置。
- 我这边用 xmake 生成了一份 makefile,习惯 make 的同学也能直接用。
- 调试工具、烧录工具等:参考我之前的那篇 libopencm3 笔记。
工程结构
工程目录结构如下:
工程与 libopencm3 的结构
1 | ./ |
- libopencm3/:库源码,首次拉取后要进目录 make 一下,生成库文件和头文件。
- libopencm3-examples/:示例仓库,可惜目前还没 STM32H7 的例子。
- stm32h7/:我自己的代码。建议你要玩 F1/F4 的话,也建个同级目录,比如 stm32f1/,方便区分不同型号。
libopencm3 与 libopencm3-examples 两个目录是 libopencm3 的官方仓库,为了方便大家拉取,我也将这两个仓库同步到了我自己部署的 Gitea 中。
地址分别是:
工程内部目录结构
1 | ./ |
- bin/ 目录用于存放编译生成的可执行文件,如果使用 xmake,则会一并生成 hex、bin 文件。
- build/ 目录用于存放编译生成的临时文件。
保持源代码和生成物分离是一个好习惯,能避免 Git 仓库污染。
- user/ 目录用于存放用户代码,我按照 HAL 的目录结构,将代码分成了 inc 和 src 两个目录,其中 inc 目录用于存放头文件,src 目录用于存放源文件。之后随着功能的增多,我还会增加 lib 等目录,分别用于存放相关的库文件。
- cortex-m-generic.ld 是链接脚本,用于指定程序的内存布局。
- makefile 是 make 的构建文件,这里我是使用 xmake 生成的,可以编译生成 elf 文件,但没有添加 hex、bin 文件的生成,如果需要生成 hex、bin 文件,可以自行添加。
- xmake.lua 是 xmake 的构建文件,用于指定项目的构建规则,我的工程也是使用 xmake 进行构建的。
功能实现
用 libopencm3 写 GPIO,需要先准备几个“地基”:
- 系统时钟配置
- SysTick 延时
- GPIO 初始化与操作
顺序差不多就是这样的,我们一步一步来。
时钟配置
我的核心板外部晶振为 25 MHz,芯片是 STM32H743VIT6,最大主频为 480 MHz,需要配置 PLL 把晶振倍频到 480 MHz,再分频给各个总线和外设。
CubeMX 的时钟树很直观,所以我通常用它来进行对照,libopencm3 的结构体配置和 CubeMX 的参数差不多是一一对应的:
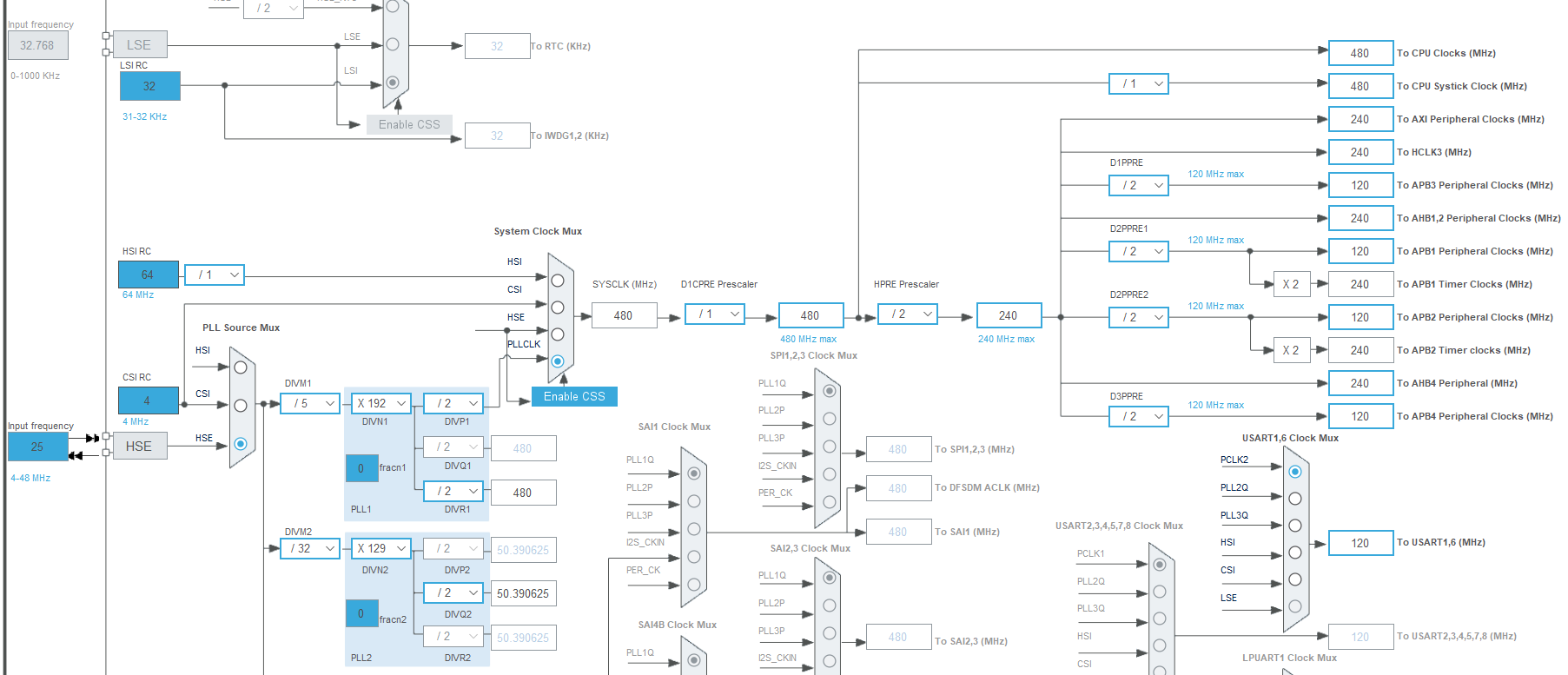
在 libopencm3 中,有一个结构体定义如下,分别对应了我们图片中的倍频、分频因子:
1 | struct rcc_pll_config { |
我们对其进行逐项解释:
sysclock_source:系统时钟源选择,对应上面图片中的 System Clock Mux 部分,一般来说,我们都是选择 PLL 作为系统时钟源。可选参数如下:
- RCC_PLL:选择 PLL 作为系统时钟源,这个是常用的配置。
- RCC_HSE:选择 HSE 作为系统时钟源。
- RCC_HSI:选择 HSI 作为系统时钟源。
- 其实还有一些参数,但我觉得不能用在系统时钟源的选择上,所以就不一一列举了。
pll_source:PLL 时钟源选择,对应图片中的 PLL Clock Mux 部分,我们通常选择 HSE 作为 PLL 时钟源,可选参数如下:
- RCC_PLLCKSELR_PLLSRC_HSE:选择 HSE 作为 PLL 时钟源,有外部晶振的情况下,我们通常选择这个配置。
- RCC_PLLCKSELR_PLLSRC_CSI:选择 CSI 作为 PLL 时钟源,CSI 是比较新的单片机(如 H7、U5)引入的 4 MHz 的内部时钟源,功耗低,但精度不高,如果说有低功耗方面的需求,可以考虑这个配置。
- RCC_PLLCKSELR_PLLSRC_HSI:选择 HSI 作为 PLL 时钟源,HSI 是一个 64 MHz 的内部时钟源,单片机上电默认就是这个时钟源,在没有外部晶振的情况下,我们通常选择这个配置(精度也不是很高)。
hse_frequency:HSE 频率,是一个 uint32_t 的变量,在配置的时候我们直接填写 HSE 的频率即可(如 25000000U),如果选择的是 HSI,则填写 0。
pll1、pll2、pll3:PLL 配置,对应图片中 PLL Source Mux 出来之后分叉出来的三条线,这三条线大同小异,我们以 pll1 为例,逐项解释:
- divm:PLL 预分频因子,对应图片中的 DIVM1,图片里面是几,我们赋值的值就是几,比如图片中是 5,我们赋值 5 即可。
- divn:PLL 倍频因子,对应图片中的 DIVN1,图片里面是几,同理,图片中是 192,我们就是赋值 192 即可。
- divp、divq、divr:PLL 后分频因子,根据 pqr 即可在锁相环上输出三个不同的时钟,对应图片中的 DIVP1、DIVQ1、DIVR1,图片里面是几,我们赋值几即可。
- divp:该通道的输出常用于系统时钟。
- divq:该通道的输出常用于 USB、SDMMC、ETH 等外设。
- divr:该通道的输出常用于 SPI、ADC、DAC 等外设。
core_pre:核心时钟预分频因子,对应图片中的 D1CPRE Prescaler,决定了核心时钟的频率,可选参数如下:
- RCC_D1CFGR_D1CPRE_BYP:不进行分频,对应于图片中的 1 分频。
- RCC_D1CFGR_D1CPRE_DIV2:2 分频。
- RCC_D1CFGR_D1CPRE_DIV4:4 分频。
- RCC_D1CFGR_D1CPRE_DIV8:8 分频。
- RCC_D1CFGR_D1CPRE_DIV16:16 分频。
- …:其他分频因子。
hpre、ppre1、ppre2、ppre3、ppre4:和核心时钟预分频因子类似,其意义在上面展示结构体 rcc_pll_config 的代码中标有注释,在图片中都分别有对应的配置可以参考,要注意图片中类似于 D2PPRE1 这样的名字,在 libopencm3 中,对应的参数是 RCC_D2CFGR_D2PPRE_DIV2,要注意区分。
flash_waitstates:闪存等待周期,这个在图片中还真没对应的,可以生成一份同样配置的 MDK 工程,在 SystemClock_Config 函数中,有如下代码:
1 | if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_4) != HAL_OK) |
可以看到函数的参数是 FLASH_LATENCY_4,这个参数对应于 libopencm3 中的 FLASH_ACR_LATENCY_4WS,所以我们赋值为 FLASH_ACR_LATENCY_4WS 即可。
- voltage_scale:电压缩放,也是新系列的单片机中出现的东西,缩放影响内核电压与最高主频,0 为高档位,档位越高,功耗越大,但主频越高。同样在 SystemClock_Config 函数中,有如下代码:
1 | __HAL_PWR_VOLTAGESCALING_CONFIG(PWR_REGULATOR_VOLTAGE_SCALE0); |
可以看到函数的参数是 PWR_REGULATOR_VOLTAGE_SCALE0,这个参数对应于 libopencm3 中的 PWR_VOS_SCALE_0,所以我们赋值为 PWR_VOS_SCALE_0 即可。
- power_mode:电源模式,同样是新系列带来的新功能,可以选择 LDO 或者 SMPS,LDO 简单易用,但功耗较大,SMPS 功耗低,但需要外部电路支持。同样在 SystemClock_Config 函数中,有如下代码:
1 | HAL_PWREx_ConfigSupply(PWR_LDO_SUPPLY); |
我们和 MDK 工程保持一致,所以也是选择 LDO 的供电方式,对应于 libopencm3 中的 PWR_SYS_LDO,所以我们赋值为 PWR_SYS_LDO 即可。
- smps_level:如果选择的是 SMPS,则需要设置电压等级,libopencm3 也提供了对应的选项,如 PWR_CR3_SMPSLEVEL_VOS,我没没有使用 SMPS,所以这里设置为什么都没关系。
在配置完参数之后,我们调用 rcc_clock_setup_pll(&pll_config); 即可进行系统时钟的初始化,该函数会根据我们配置的参数,设置到寄存器中,完成系统时钟的初始化。
对于时钟的初始化来说,执行顺序其实是一个值得考虑的事情,先初始化什么,后初始化什么,都是有考量的,不过 libopencm3 已经做好这一步了,如果你对执行的顺序有所疑惑,可以查看 libopencm3 源码,在libopencm3/lib/stm32/h7/rcc.c中,可以看到 rcc_clock_setup_pll 函数的执行顺序,对于理解时钟的初始化过程,有很大的帮助。
使用第三方库,需要多看源码,多找定义,多翻阅文档,多动手实践,才能熟练使用。
SysTick 延时
众所周知,HAL 库的 HAL_Delay 是基于 SysTick 实现的,延时/计时对于单片机程序来说,是一个非常重要的功能,所以 SysTick 定时器的初始化,也是我们必须要做的。
因为 SysTick 是 ARM 内核提供的,并不是 STM32 系列单片机独有的,所以在初始化思路上来说,你可以借鉴任何一个 ARM 内核处理器的相关代码,我这里还是以 CubeMX 生成的代码作为参考,进行滴答定时器的初始化。
在 HAL_Init 这个函数中,有如下代码:
1 | if(HAL_InitTick(TICK_INT_PRIORITY) != HAL_OK) |
这个函数实现了 SysTick 的初始化,主要包含了如下几步:
- SysTick 时钟源选择。
- SysTick 重装值设置。
- SysTick 计数值清零。
- SysTick 中断优先级设置。
- SysTick 中断使能。
- SysTick 使能。
对应于 libopencm3 中的代码如下:
1 | void systick_init(uint32_t ticks) |
SysTick 可以正常工作之后,我们写好中断和延时函数:
1 | volatile uint32_t systick = 0; |
这样就能愉快用 user_delay_ms() 进行毫秒级延时了。
补充:延时时间展示
那么我们这样初始化之后,到底对不对呢,能不能实现延时的功能呢?我写了一个简单的程序,在无限循环中,每隔 100ms,翻转一次 PE3 引脚,如下:
1 | while (1) |
然后我们使用逻辑分析仪,采集 PE3 引脚的电平,如下:
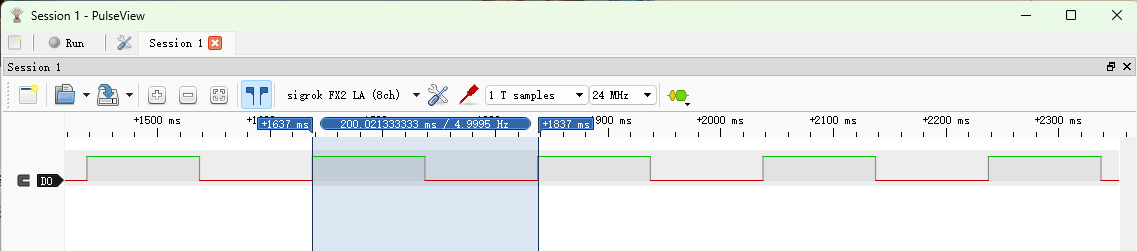
可以看到,PE3 引脚高电平+低电平的持续时间为200.021 ms,结合逻辑分析仪和定时器本身的误差,我们可以认为,这个延时是准确的。
GPIO
GPIO 初始化
绕了一大圈才回到主题,接下来的事情反而很简单,我们只需要像标准库一样,进行时钟使能,然后配置引脚的模式即可,libopencm3 中,GPIO 的配置,需要分两步进行,第一步是配置引脚的模式,第二步是配置引脚的属性。
这一部分函数名就可以表达出其功能,所以直接上代码:
1 | void user_gpio_setup(void) |
基本思路就是使能时钟->配置引脚模式->配置引脚属性,然后就可以使用对应的引脚了。
但是,在 STM32 中,PC13 - PC15 这三个引脚是比较特殊的,有以下一些需要注意的地方:
- 他们属于低速I/O,最大只能工作在 2MHz。
- 驱动能力弱,一般用作输入或者低速输出(所以核心板用这个引脚作为按键还是有一定合理性的)。
- 在 STM32H7 中,这三个引脚属于备份域(Backup Domain),为了防止程序误操作,也为了保持主电源掉电之后的可靠性,单片机在默认上电的时候是禁止访问备份域的,所以我们需要在初始化的时候,先使能备份域的访问权限,也就是在代码中,先执行 PWR_CR1 |= PWR_CR1_DBP; 这一行代码。
可能你会问,为什么在使用 HAL 库的时候没有这样的问题,因为 HAL 库在 SystemClock_Config 函数中,调用了 HAL_RCC_OscConfig,而这个函数中进行了备份域的写使能:PWR->CR1 |= PWR_CR1_DBP;,所以在使用 HAL 库的时候,不需要手动写使能备份域的代码。
GPIO 读写
和上一篇的代码逻辑一致,当按键按下的时候,进行 LED 的翻转,代码如下:
1 | int main(void) |
如果要直接控制电平,可以使用 gpio_set 和 gpio_clear 函数,如 gpio_set(GPIOE, GPIO3); 和 gpio_clear(GPIOE, GPIO3);。
对于读取函数来说,虽然看起来没有什么问题,但是要注意 gpio_get 函数返回的并不是电平的逻辑值,而是包含所选引脚状态的位掩码。例如:
- 当 PC13 引脚为高电平时,gpio_get(GPIOC, GPIO13) 返回 0x2000(即 1 << 13),而不是单纯的 1。
- 当 PC13 为低电平时,返回值才是 0。
因此,在读取引脚电平的时候,应当判断它是不是 0,才能保证引脚电平的正确性。
总结
这一篇文章还是比较啰嗦了,本来只是想点亮一个灯,结果为了把地基打稳,写了大半篇。
用 libopencm3 开发 STM32H7,最大的心得是:
- 要习惯自己写初始化,不像 HAL 那样一口气帮你包好。
- 多看源码,多对照 CubeMX,少走弯路。
- 习惯把工程目录分层,方便后面扩展。